

Optimal Firing Attitude Design for Mars Probe “Tianwen-1” Braking and Capture
-
摘要:针对中国首次自主火星探测任务“天问一号”(Tianwen-1)的火星捕获制动期间点火姿态设计最优化问题,提出了整器约束条件下的分析思路和解决方法。首先建立捕获阶段的轨道动力学模型,根据捕获前轨道和捕获后的目标轨道以燃料消耗最少为优化目标,使用牛顿迭代法寻优解出轨道平面内最佳的推力方向和点火时刻,得到推力矢量。再结合探测器的光照、测控约束条件,确定了绕推力方向的偏转范围。最后参考星敏感器布局,对全过程不同偏转角度下星敏受天体遮挡情况进行分析,计算出星敏可用台数以及可用时长,按照可用时长最优的原则确定出最优的点火姿态。在轨实际制动捕获结果表明,轨控后半长轴偏差小于947.122 km(半长轴变化量102 346.152 km),偏心率偏差小于0.002 1,同时全程满足整器测控、光照的需求,捕获全过程中保持任意时刻至少有2台星敏可用,根据遥测结果对比星敏的可用时段仿真误差小于0.225 h。Abstract:To optimize ignition attitude design during Mars capture and braking of China’s first autonomous Mars exploration mission “Tianwen-1”, an analysis idea and a solution under the constraint of the whole vehicle were proposed. Firstly, the trajectory dynamics model in the capture phase was established. According to the pre-capture trajectory and the post-capture target trajectory, optimal thrust direction and ignition time in the orbit plane were solved by Newton iteration method with minimum fuel consumption as optimization objective, and thrust vector was obtained. Combined with illumination and measurement and control constraints of the detector, deflection range around thrust direction was determined. Finally, referring to the layout of star sensors, occlusion of star sensors by celestial bodies at different deflection angles during the whole process was analyzed, and the number of available star sensors and the available duration were calculated. The optimal ignition attitude was determined according to the principle of optimal available duration. The actual on-track braking capture results show that the semi-major axis deviation after track control is less than 947.122 km (semi-major axis variation of 102346.152 km), and the eccentricity deviation is less than 0.0021. At the same time, the whole process can meet the requirements of the whole device for measurement and control and illumination. During the whole acquisition process, at least two star sensors are available at any time, and compared with the telemetry results, the simulation error of the available duration of star sensors is less than 0.225 h.
-
Key words:
- Mars probe/
- braking and capture/
- firing attitude
Highlights● Determine the thrust direction with optimal fuel. ● Maximum arc length constraint for multiple star sensors. ● Analysis of braking acquisition attitude under multiple constraints. -

图 10星敏光轴与器火矢量夹角(姿态偏置40°)
Fig. 10Angle between optical axis of star sensor and vector of probe-Mars

图 13捕获段星敏与火星视场关系
Fig. 13Relationship between star sensor and field of view of Mars for braking and capture
表 1轨控前后轨道参数(火心惯性系)
Table 1Parameters before and after orbit control (Mars inertial coordinate)
历元 a/km e i/(°) Ω/(°) ω/(°) f/(°) 变轨前 UTC2021,2,10,12,0,0 –695 6.475 27 1.545 61 10.999 9 176.981 115.368 137 0.00 变轨后 961 71.055 7 0.960 53 10.999 9 176.981 115.368 137 0.00  下载:
导出CSV
下载:
导出CSV
表 2迭代参数
Table 22 Iteration parameters
初始质量/kg 推力/N 比冲/s 初始近点角/(°) 初始推力方向角/(°) 4 461.4 3 000 312 –48 3 下载:
导出CSV
表 3最优轨控策略
Table 33 Optimal orbit control strategy
近点角/(°) 推力方向角/(°) 推力矢量 轨控时长/s 燃料消耗/kg 34.69 0.06 –0.365417 895 953.356 –0.91702 –0.159828 下载:
导出CSV
表 4星敏光学参数
Table 44 Star sensor optical parameter
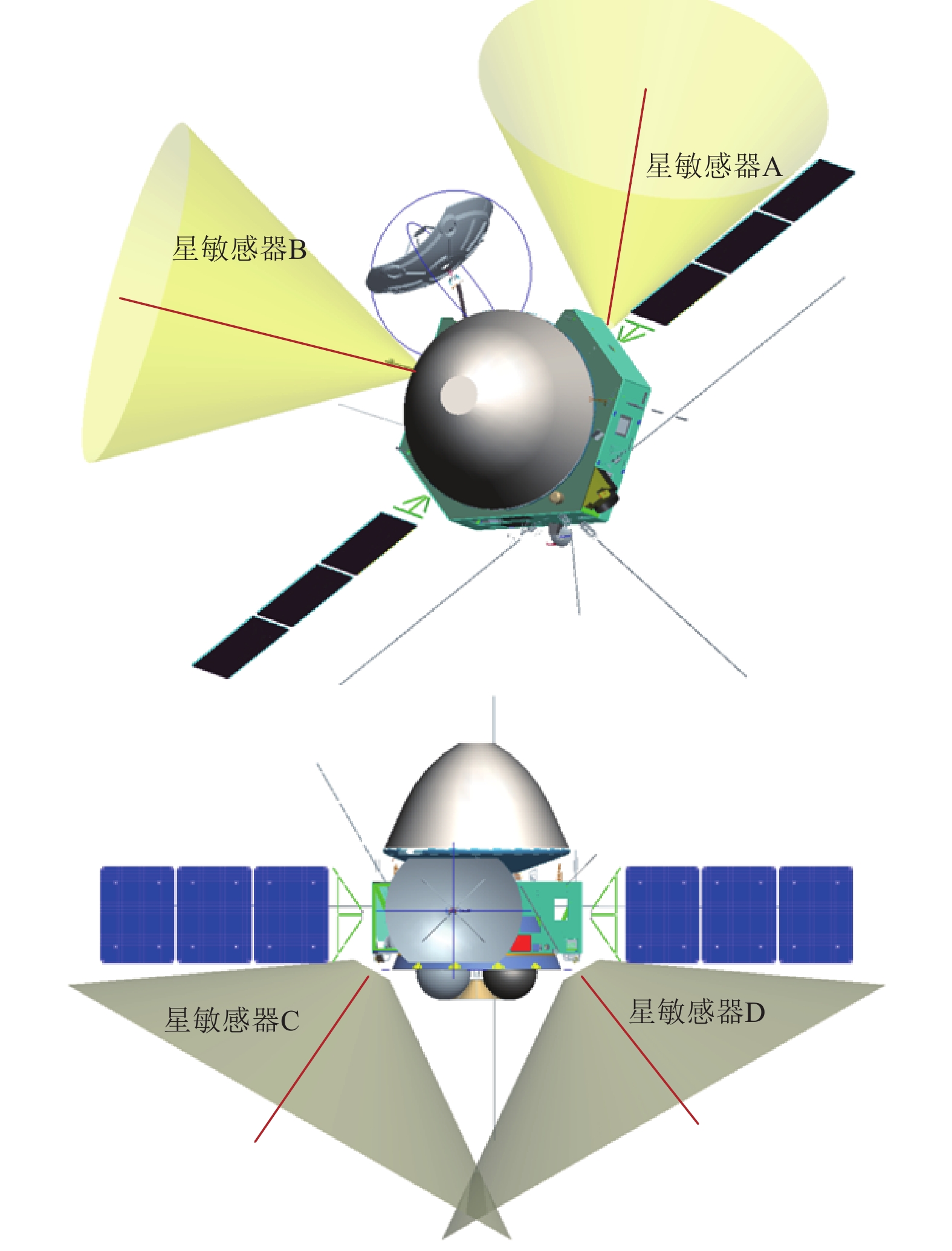
光轴矢量(本体系投影) 视场角 星敏A –0.5 –0.49673 –0.709406 20° 星敏B 0.5 0.53318 –0.68244 20° 星敏C –0.86603 –0.5 0 20° 星敏D –0.86603 0.5 0 20° 下载:
导出CSV
表 5轨道参数变化①
Table 5Change of orbital parameters
Δa/km Δe Δi/(°) ΔΩ/(°) Δω/(°) ΔM/(°) 变化量 102 346.152 –0.588 31 –0.005 19 0.047 28 –0.101 59 0.00 轨控偏差 947.122 1.89 × 10–5 2.104 × 10–3 2.481 × 10–3 1.724 × 10–3 2.773 5 × 10–4 注:①为控后24 h的测定轨结果 下载:
导出CSV
表 6星敏工作时段
Table 66 Star sensor working hours
星敏 开始受遮挡时刻/(h)① 结束受遮挡时刻/(h)① 仿真 实际 偏差 仿真 实际 偏差 星敏A 1.698 1.883 0.185 2.191 2.102 –0.089 星敏B 2.125 2.349 0.224 2.303 2.382 0.079 星敏C 1.510 1.452 –0.058 2.117 2.102 –0.015 星敏D 0.226 0.215 6 –0.010 4 2.117 2.102 –0.015 注:表中的时刻均以BJT2021-2-10-17-30-0为零点,相对该点的相对时刻。 下载:
导出CSV
-
[1] RANIERI C L,OCAMPO C A. Indirect optimization of spiral trajectories[J]. Journal of Guidance,Control,and Dynamics,2006,29(6):1360-1366. [2] PONTANI M,CONWAY B A. Particle swarm optimization applied to space trajectories[J]. Journal of Guidance Control,and Dynamics,2010,33(5):1429-1441.doi:10.2514/1.48475 [3] GARG D A,HAGER W W,RAO A V. Pseudospectral methods for solving infiniehorizon optimal control problems[J]. Automatica,2011,47(4):829-837.doi:10.1016/j.automatica.2011.01.085 [4] HECHLER M,YANEZ A. Mars express orbit design[J]. Acta Astronautica,2003,53(4):497-507. [5] SANCHEZ PEREZ J M, CANABAL R. Review of venus express mission analysis[C]//18thInternational Symposium on Space Flight Dynamics, 2004: 245. [6] 李军锋,龚胜平. 有限推力模型火星探测捕获策略分析[J]. 中国科学:物理学力学天文学,2013,43(6):781-786.doi:10.1360/132012-318LI J F,GONG S P. Analysis of capture strategies for Mars explorer with finite-thrust[J]. Sci Sin-Phys Mech Astron,2013,43(6):781-786.doi:10.1360/132012-318 [7] 李爽,彭玉明,陆宇平. 火星EDL导航、制导与控制技术综述与展望[J]. 宇航学报,2010,3(3):621-627.doi:10.3873/j.issn.1000-1328.2010.03.001LI S,PENG Y M,LU Y P. Review and prospect of Mars EDL navigation guidance and control technologies[J]. Journal of Astronautics,2010,3(3):621-627.doi:10.3873/j.issn.1000-1328.2010.03.001 [8] 闵学龙,潘腾,郭海林. 火星探测器使命轨道捕获策略研究[J]. 航天器工程,2008,17(6):39-43.doi:10.3969/j.issn.1673-8748.2008.06.004MIN X L,PAN T,GUO H L. Analysis of orbit capture method for Mars vehicle[J]. Spacecraft Engineering,2008,17(6):39-43.doi:10.3969/j.issn.1673-8748.2008.06.004 [9] 陈杨,赵国强,宝音贺西,等. 精确动力学模型下的火星探测轨道设计[J]. 中国空间科学技术,2011,31(2):8-15.CHEN Y,ZHAO G Q,BAOYIN H X,et al. Orbit design for Mars exploration by the accurate dynamic model[J]. Chinese Space Science and Technology,2011,31(2):8-15. [10] 方宝东,吴美平,张伟. 火星引力捕获动力学与动态误差分析[J]. 力学学报,2015,47(1):15-23.doi:10.6052/0459-1879-14-327FANG B D,WU M P,ZHANG W. Mars gravity capture dynamic model and error analysis[J]. Chinese Journal of Theoretical and Applied Mechanics,2015,47(1):15-23.doi:10.6052/0459-1879-14-327 [11] EDELBAUM T N. Optimal Low-thurst transfer between circular and eliptical orbits[J]. Journal of ASME,1962,84(2):134-141. [12] GOBETZ F W. Optimal variable-thrust transfer of a power-limited rocket between neighboring circular orbits[J]. AIAA Journal,1964,2(2):339-343.doi:10.2514/3.2281 [13] JIANG F,BAOYIN H,LI J. Practical techniques for low-thurst trajectory optimization with homotopic approach[J]. Journal of Guidance,Control,and Dynamics,2012,35(1):245-258. [14] 李革非, 韩潮. 月球捕获控制分析[C]//全国第十二届空间及运动体控制技术学术年会. 中国自动化学会: 桂林, 2006. [15] 刘玥,荆武兴. 利用虚拟卫星法求解火星探测器近火点制动策略[J]. 哈尔滨工业大学学报,2013,45(1):14-18.doi:10.11918/hitxb20130103LIU Y,JING W X. Mars probe near-center braking strategy using virtual satellite method[J]. Journal of Harbin Institute of Technology,2013,45(1):14-18.doi:10.11918/hitxb20130103 [16] 刘博,王云财,张松涛,等. 火星探测器制动捕获多目标优化策略[J]. 动力学与控制学报,2019,17(4):356-361.doi:10.6052/1672-6553-2019-032LIU B,WANG Y C,ZHANG S T,et al. Multi-objective optimization strategy for brake capture of Mars explorer[J]. Journal of Dynamics and Control,2019,17(4):356-361.doi:10.6052/1672-6553-2019-032 [17] FISCHER J, DENIS M. Mars orbit insertion — a new challenge for Europesuccess with ESA’s Mars express [C]//European Space Operations Centre. IEEEAC, European Space Operations Centre: [s. n. ], 2004. [18] 罗绪盛,麻娜,荆武兴等. 采用有限推力的火星捕获制动策略[J]. 西北工业大学学报,2017,35(2):348-354.doi:10.3969/j.issn.1000-2758.2017.02.028LUO X S,MA N,JING W X,et al. Capture and brake strategy for Mars explorer with finite-thrust[J]. Journal of Northwestern Polytechnical University,2017,35(2):348-354.doi:10.3969/j.issn.1000-2758.2017.02.028 [19] 刘玥. 火星探测器近心点制动与轨道保持优化设计[D]. 哈尔滨: 哈尔滨工业大学, 2011.LIU Y. Optimal design for Mars probe in near-center braking and orbit keeping[D]. Harbin: Harbin Institute of Technology University, 2011. [20] 朱静芬. 关于牛顿类迭代法的收敛性和误差分析[D]. 杭州: 浙江大学, 2004.ZHU J F. On the convergence and error analysis of Newton's iterative method[D]. Hangzhou: Zhejiang University, 2004. -


 下载:
下载:













计量
- 文章访问数:15
- 被引次数:0
